IPIN ‘15 - A Comparative Analysis of Attitude Estimation for Pedestrian Navigation with Smartphones
This page has been created to supplement the article A Comparative Analysis of Attitude Estimation for Pedestrian Navigation with Smartphones submitted to IPIN 15’ conference.
Slides: here
Contact: Thibaud Michel
Motions
In order to have a variety of different handheld motions datasets, we identify five typical motions for a smartphone, inspired from Renaudin’s paper:
- Walking with a texting hand: the user is walking while typing or reading a message/instruction on the screen’s device.
- Walking with a phoning hand: the user is using the device to make or receive a phone call.
- Walking with a swinging hand: the user is walking holding the portable device in the hand.
- Walking with the mobile device in the back pocket.
- Static: the subject is not moving.
Acquisition platform
Platform used for our tests is a Google Nexus 5. Internal sensors are really cheap and cost at most 3€:
- a 6-axis InvenSense MPU6515 accelerometer and gyroscope
- a 3-axis AKM AK8963 magnetometer
Records of sensors has been made thanks to a homemade log application. InvenSense sensor can monitor activity up to 200Hz while AKM one only to 60Hz. For the purpose of aligning timestamps of magnetic field data with data obtained from accelerometer and gyroscope, we used a linear extrapolation, in order to keep the focus on a real-time algorithm, interpolation is unallowable here. We choose to align data at 200Hz but similar results can be obtained until a sampling at 50Hz.
Model
An Allan variance study has been made on a large dataset. Results are shown on matlab .fig files
Calibration
For our tests we used:
- uncalibrated data
- android calibrated data
- Frosio et al. accelerometer calibrated data
vector_bias = [ 0.117 0.015 0.296 ]
matrix_trans = [ 1.004 0.012 0.001 ; 0.012 1.004 -0.001 ; 0.001 -0.001 1.000] - Renaudin et al. magnetometer calibrated data
vector_bias = [ 31.33 165.24 315.92 ]
matrix_trans = [ 1.010 0.025 -0.021 ; 0.025 0.965 0.017 ; -0.021 0.017 1.031]
IPIN-calib-accelero.mat and IPIN-calib-magneto.mat are datasets used for accelerometer and magnetometer calibration.
The relation between uncalibrated data and calibrated data is given by:
calibrated_data = (uncalibrated_data - vector_bias) * matrix_trans
Platform Handler
A smartphone handler with infrared markers has been created with a 3D printer for this study.

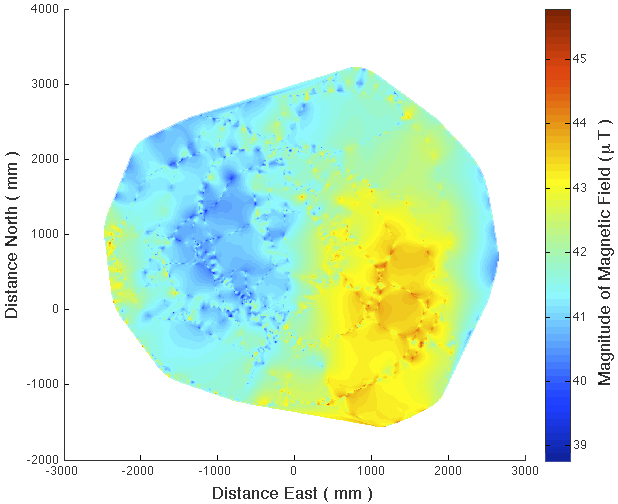
Reference platform
Tests have been made in a 10mx10m square motion lab. In this room, we observed that the magnetic field is almost homogeneous from a subplace to another (variations are less than 3μT, and with negligible variations over time.
Our room is equipped with 20 Oqus cameras connected to a server and Qualisys Tracker software. A 150Hz sampling is used.

Datasets
Motion datasets are composed of:
- Nexus 5 records. Inside .mat file, uncalibrated data and android calibrated data are provided
- Qualisys records
- Date of record
- Location of record
Texting
- Sensors: IPIN-texting.mat
- Reference: IPIN-texting-ref.mat
- Date: 26-06-2015
- Location: Kinovis - 45.218188, 5.807116
Phoning
- Sensors: IPIN-phoning.mat
- Reference: IPIN-phoning-ref.mat
- Date: 26-06-2015
- Location: Kinovis - 45.218188, 5.807116
Swinging
- Sensors: IPIN-swinging.mat
- Reference: IPIN-swinging-ref.mat
- Date: 26-06-2015
- Location: Kinovis - 45.218188, 5.807116
Back Pocket
- Sensors: IPIN-back-pocket.mat
- Reference: IPIN-back-pocket-ref.mat
- Date: 26-06-2015
- Location: Kinovis - 45.218188, 5.807116
Magnets
- Sensors: IPIN-magnets.mat
- Reference: static
- Date: 26-06-2015
- Location: Kinovis - 45.218188, 5.807116